
Industrial Human-Robot Collaboration
Published:
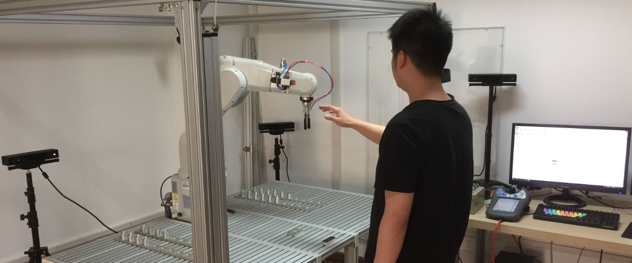
This hybrid human-robot collaborative cell is based on multiple sensors and ABB IRB 1200 industrial robot. Microsoft Kinect was utilized to capture the motion of human. For more information, please see our paper published on IJPR.
Quan Liu, Zhihao Liu, Wenjun Xu, Quan Tang, Zude Zhou, Pham Duc Truong. Human-robot collaboration in disassembly for sustainable manufacturing. International Journal of Production Research, 2019, 57(12), 4027-4044. (Supervisor is the first author,IF=8.568, JCR Q1, CAS Q2) [Paper · PDF · BibTeX · EndNote · RefMan · RefWorks]
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)