 Postdoctoral Researhcer, KTH Royal Institute of Technology
Postdoctoral Researhcer, KTH Royal Institute of Technology Postdoc Fellow, Centre of Excellence in Production Research, Sweden
Postdoc Fellow, Centre of Excellence in Production Research, SwedenZhihao Liu is currently a Postdoctoral Researcher at KTH Royal Institute of Technology, and a Postdoc Fellow at XPRES. Before joining KTH, he earned his Ph.D. degree in information technology and communication engineering from Wuhan University of Technology in 2023. During his Ph.D. study, he was a guest doctoral student at KTH from 2019 to 2021. He finished his master’s and bachelor’s degrees at WUT in 2018 and 2016 respectively. His research interests include Industry 5.0, digital twin and metaverse, embodied AI, human-robot collaboration, robot learning, neural information processing, human-compatible AI, etc.
Zhihao Liu is the winner of the Outstanding Doctoral Thesis Award and National Scholarship, which is the highest scholarship award for a Ph.D. student in China.
He is a member of IEEE and ACM and a member of ACM Europe Technology Policy Committee and IEEE Technical Committee on Robot Learning.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 Wuhan University of TechnologySchool of Information Engineering
Wuhan University of TechnologySchool of Information Engineering
Ph.D., Information & Communication EngineeringSep. 2018 - Jun. 2023 -
KTH Royal Institute of TechnologyDepartment of Production Engineering
Guest Ph.D., Robotics & Artificial IntelligenceSep. 2019 - Aug. 2021 -
Wuhan University of TechnologySchool of Information Engineering
M.Eng, Information & Communication EngineeringSep. 2016 - Jun. 2018 -
Wuhan University of TechnologySchool of Information Engineering
B.Eng, Communication EngineeringSep. 2012 - Jun. 2016
Experience
-
KTH Royal Institute of TechnologyPostdoctoral ResearhcerAug. 2023 - now
-
Centre of Excellence in Production Research, SwedenPostdoc FellowAug. 2023 - now
-
Wuhan University of TechnologyResearch AssistantSep. 2015 - Jun. 2023
Honors & Awards
-
Outstanding Doctoral Thesis Award2023
-
National Scholarship for Ph.D.2021
-
1st-class Scholarship for Ph.D.2021
-
Best Application Paper Award2019
-
Honorary Paper2018
-
1st-class Scholarship for Ph.D. Freshmen2018
-
1st-class Scholarship for Master Students2017
-
Outstanding Master Students2017
-
Outstanding Scholarship (above the 1st-class) for Master Freshmen2016
-
Outstanding Bachelor Graduate2016
-
Outstanding Bachelor Student with Additional Extracurricular Raise Plan)2016
-
Merit Bachelor Student2015
-
Special Prize (above 1st Prize), TI (Texas Instruments) Undergraduate Electronics Design Contest2014
News
Selected Publications (view all )

Robot digital twin systems in manufacturing: Technologies, applications, trends and challenges
Qiang Qin, Zhihao Liu, Ruirui Zhong, Xi Vincent Wang, Lihui Wang, Magnus Wiktorsson, Wei Wang
Robotics and Computer-Integrated Manufacturing 2026
The manufacturing industry is undergoing a profound transformation toward smart, digital, and flexible production systems under the Industry 4.0 framework. This paper proposes a four-layer Robot Digital Twin (RDT) architecture that demonstrates how key Industry 4.0 technologies collectively enhance RDT's capabilities in manufacturing systems. It provides an in-depth analysis of current RDT systems' applications from domain-specific and system-level perspectives, offering valuable insights into their implementation and potential impacts. The paper also identifies critical trends, practical challenges, and promising future research directions for advancing RDT systems towards smarter and more adaptive manufacturing paradigms.
Robot digital twin systems in manufacturing: Technologies, applications, trends and challenges
Qiang Qin, Zhihao Liu, Ruirui Zhong, Xi Vincent Wang, Lihui Wang, Magnus Wiktorsson, Wei Wang
Robotics and Computer-Integrated Manufacturing 2026
The manufacturing industry is undergoing a profound transformation toward smart, digital, and flexible production systems under the Industry 4.0 framework. This paper proposes a four-layer Robot Digital Twin (RDT) architecture that demonstrates how key Industry 4.0 technologies collectively enhance RDT's capabilities in manufacturing systems. It provides an in-depth analysis of current RDT systems' applications from domain-specific and system-level perspectives, offering valuable insights into their implementation and potential impacts. The paper also identifies critical trends, practical challenges, and promising future research directions for advancing RDT systems towards smarter and more adaptive manufacturing paradigms.
Sequential Human Assembly and Disassembly Motions in Human-Robot Coexisting Environments
Zhihao Liu, Tianyu Wang, Zhenrui Ji, Wenjun Xu, Lihui Wang, Xi Vincent Wang
Scientific Data 2025
As human-robot systems and autonomous robots become increasingly prevalent, the need for task-oriented datasets to study human behaviors in shared spaces has grown significantly. This paper presents a novel dataset focusing on sequential human assembly and disassembly motions in human-robot coexisting environments. It contains over 10,000 samples recorded from multi-view camera setups, each comprising synchronized RGB videos and 2D and 3D human skeletons. Data were collected from 33 participants with diverse physical characteristics and behavior preferences. This dataset highlights practical challenges such as partial occlusions, similar repetitive motions, and varying human behaviors, which are often overlooked in existing datasets. Technical validation using benchmarking with state-of-the-art deep learning models reveals significant potential for practical applications.
Sequential Human Assembly and Disassembly Motions in Human-Robot Coexisting Environments
Zhihao Liu, Tianyu Wang, Zhenrui Ji, Wenjun Xu, Lihui Wang, Xi Vincent Wang
Scientific Data 2025
As human-robot systems and autonomous robots become increasingly prevalent, the need for task-oriented datasets to study human behaviors in shared spaces has grown significantly. This paper presents a novel dataset focusing on sequential human assembly and disassembly motions in human-robot coexisting environments. It contains over 10,000 samples recorded from multi-view camera setups, each comprising synchronized RGB videos and 2D and 3D human skeletons. Data were collected from 33 participants with diverse physical characteristics and behavior preferences. This dataset highlights practical challenges such as partial occlusions, similar repetitive motions, and varying human behaviors, which are often overlooked in existing datasets. Technical validation using benchmarking with state-of-the-art deep learning models reveals significant potential for practical applications.
One-shot learning-driven autonomous robotic assembly via human-robot symbiotic interaction
Quan Liu, Zhenrui Ji, Wenjun Xu, Zhihao Liu, Lihui Wang
npj Advanced Manufacturing 2025
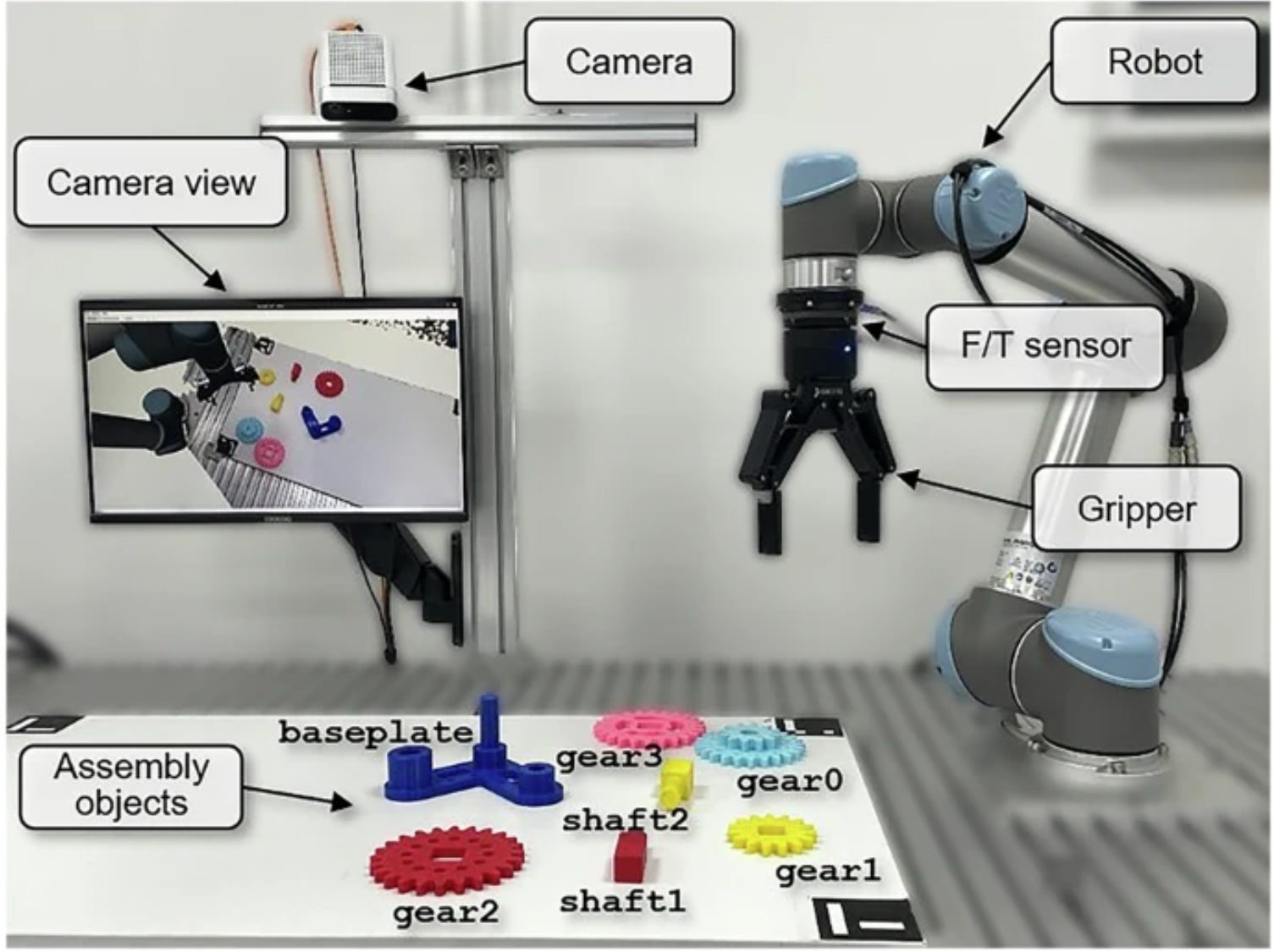
Multi-procedure robotic assembly requires robots to sequentially assemble components, yet traditional programming is labor-intensive and end-to-end learning methods struggle with vast task spaces. This paper introduces a one-shot learning from demonstration (LfD) approach that leverages third-person visual observations to reduce human intervention and improve adaptability. First, an object-centric representation is proposed to preprocess demonstrations of human assembly tasks via RGB-D camera. Then, a kinetic energy-based changepoint detection algorithm automatically segments procedures, enhancing the robot’s understanding of human intent. Third, a demo-trajectory adaptation-enhanced dynamical movement primitive (DA-DMP) method is proposed to improve the efficiency and generalization of motion skills. The integrated system uses visual feedback for closed-loop reproduction of multi-procedure assembly skills, validated on a real-world robotic assembly platform. Results show accurate sequence learning from a single demonstration, efficient motion planning, and a 93.3% success rate. It contributes to trustworthy and efficient human–machine symbiotic manufacturing systems, aligning with human-centered automation
One-shot learning-driven autonomous robotic assembly via human-robot symbiotic interaction
Quan Liu, Zhenrui Ji, Wenjun Xu, Zhihao Liu, Lihui Wang
npj Advanced Manufacturing 2025
Multi-procedure robotic assembly requires robots to sequentially assemble components, yet traditional programming is labor-intensive and end-to-end learning methods struggle with vast task spaces. This paper introduces a one-shot learning from demonstration (LfD) approach that leverages third-person visual observations to reduce human intervention and improve adaptability. First, an object-centric representation is proposed to preprocess demonstrations of human assembly tasks via RGB-D camera. Then, a kinetic energy-based changepoint detection algorithm automatically segments procedures, enhancing the robot’s understanding of human intent. Third, a demo-trajectory adaptation-enhanced dynamical movement primitive (DA-DMP) method is proposed to improve the efficiency and generalization of motion skills. The integrated system uses visual feedback for closed-loop reproduction of multi-procedure assembly skills, validated on a real-world robotic assembly platform. Results show accurate sequence learning from a single demonstration, efficient motion planning, and a 93.3% success rate. It contributes to trustworthy and efficient human–machine symbiotic manufacturing systems, aligning with human-centered automation
A design framework for high-fidelity human-centric digital twin of collaborative work cell in Industry 5.0
Tianyu Wang, Zhihao Liu, Lihui Wang, Mian Li, Xi Vincent Wang
Journal of Manufacturing Systems 2025
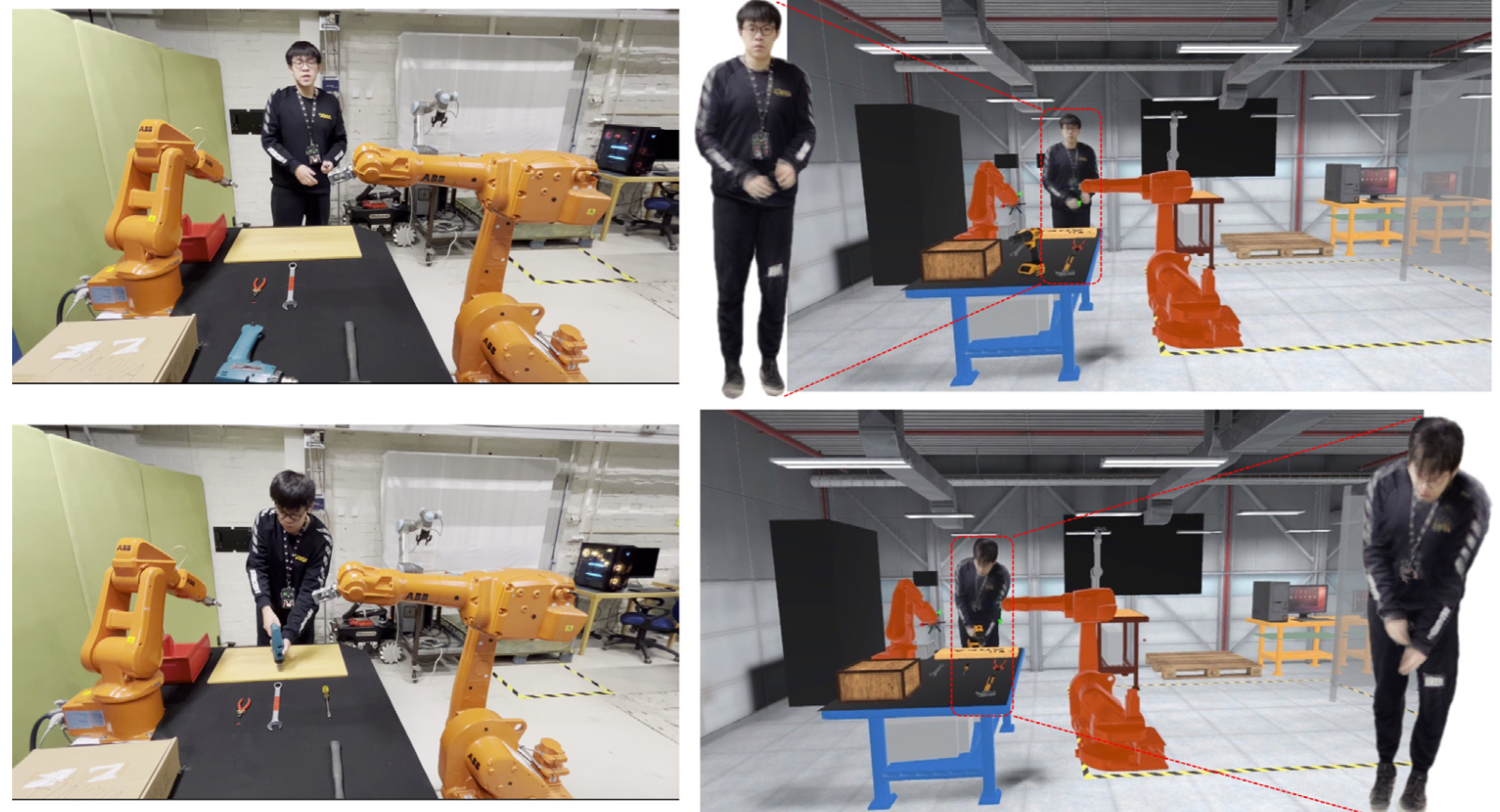
Digital Twin (DT) of a manufacturing system mainly involving materials and machines has been widely explored in the past decades to facilitate the mass customization of modern products. Recently, the new vision of Industry 5.0 has brought human operators back to the core part of work cells. To this end, designing human-centric DT systems is vital for an ergonomic and symbiotic working environment. However, one major challenge is the construction and utilization of high-fidelity digital human models. In the literature, preset universal human avatar models such as skeletons are mostly employed to represent the human operators, which overlooks the individual differences of physical traits. Besides, the fundamental utilization features such as motion tracking and procedure recognition still do not well address the practical issues such as occlusions and incomplete observations. To deal with the challenge, this paper proposes a systematic design framework to quickly and precisely build and utilize the human-centric DT systems. The mesh-based customized human operator models with rendered appearances are first generated within one minute from a short motion video. Then transformer-based deep learning networks are developed to realize the motion-related operator status synchronization in complex conditions. Extensive experiments on multiple real-world human–robot collaborative work cells show the superior performance of the proposed framework over the state-of-the-art.
A design framework for high-fidelity human-centric digital twin of collaborative work cell in Industry 5.0
Tianyu Wang, Zhihao Liu, Lihui Wang, Mian Li, Xi Vincent Wang
Journal of Manufacturing Systems 2025
Digital Twin (DT) of a manufacturing system mainly involving materials and machines has been widely explored in the past decades to facilitate the mass customization of modern products. Recently, the new vision of Industry 5.0 has brought human operators back to the core part of work cells. To this end, designing human-centric DT systems is vital for an ergonomic and symbiotic working environment. However, one major challenge is the construction and utilization of high-fidelity digital human models. In the literature, preset universal human avatar models such as skeletons are mostly employed to represent the human operators, which overlooks the individual differences of physical traits. Besides, the fundamental utilization features such as motion tracking and procedure recognition still do not well address the practical issues such as occlusions and incomplete observations. To deal with the challenge, this paper proposes a systematic design framework to quickly and precisely build and utilize the human-centric DT systems. The mesh-based customized human operator models with rendered appearances are first generated within one minute from a short motion video. Then transformer-based deep learning networks are developed to realize the motion-related operator status synchronization in complex conditions. Extensive experiments on multiple real-world human–robot collaborative work cells show the superior performance of the proposed framework over the state-of-the-art.
Establishment and Synchronisation of Digital Twins for Multi-robot Systems in Manufacturing
Zhihao Liu, Sichao Liu, Tianyu Wang, Lihui Wang, Xi Vincent Wang
58th CIRP Conference on Manufacturing Systems 2025
In Industry 5.0, digital twins have emerged as powerful tools for revolutionizing the operation and control of industrial robots. However, a critical challenge is how to effectively synchronise the establishment and ongoing operations of physical devices with their virtual counterparts to ensure seamless performances. To address the challenge, this paper introduces a state machine-driven method to orchestrate hardware interface establishment and synchronisation processes for multi-robot systems in manufacturing. By leveraging state machines to model the lifecycle of hardware interfaces and their corresponding controllers, a systematic solution is provided for managing transitions and real-time synchronisation across multiple industrial robots. It not only enhances the initialisation efficiency but also ensures consistent system operations. The proposed method is validated through detailed case studies that demonstrate visible improvements in the deployment of manufacturing systems containing multiple industrial robots with different vendors and protocol interfaces. This work contributes to constructing digital twins that can dynamically adapt to evolving industrial environments.
Establishment and Synchronisation of Digital Twins for Multi-robot Systems in Manufacturing
Zhihao Liu, Sichao Liu, Tianyu Wang, Lihui Wang, Xi Vincent Wang
58th CIRP Conference on Manufacturing Systems 2025
In Industry 5.0, digital twins have emerged as powerful tools for revolutionizing the operation and control of industrial robots. However, a critical challenge is how to effectively synchronise the establishment and ongoing operations of physical devices with their virtual counterparts to ensure seamless performances. To address the challenge, this paper introduces a state machine-driven method to orchestrate hardware interface establishment and synchronisation processes for multi-robot systems in manufacturing. By leveraging state machines to model the lifecycle of hardware interfaces and their corresponding controllers, a systematic solution is provided for managing transitions and real-time synchronisation across multiple industrial robots. It not only enhances the initialisation efficiency but also ensures consistent system operations. The proposed method is validated through detailed case studies that demonstrate visible improvements in the deployment of manufacturing systems containing multiple industrial robots with different vendors and protocol interfaces. This work contributes to constructing digital twins that can dynamically adapt to evolving industrial environments.
Vision-Language-Conditioned Learning Policy for Robotic Manipulation
Sichao Liu, Zhihao Liu, Lihui Wang, Xi Vincent Wang
Conference on Robot Learning, Workshop on Language and Robot Learning: Language as an Interface 2024
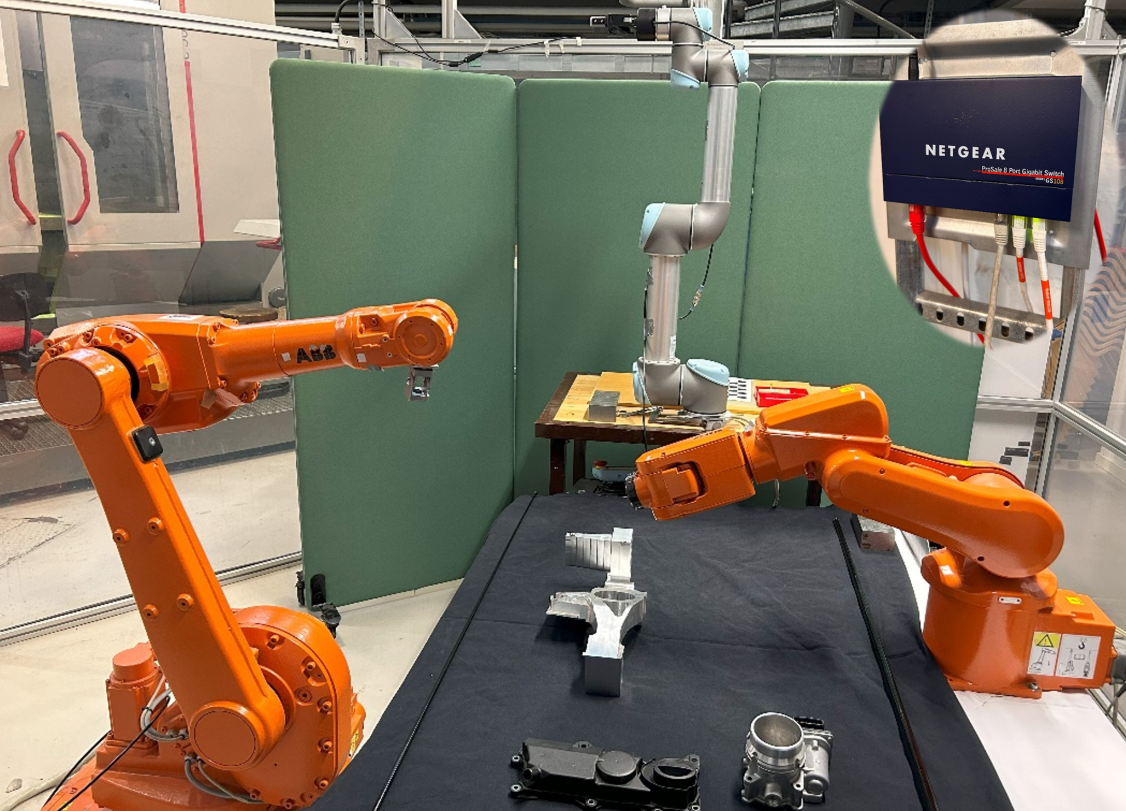
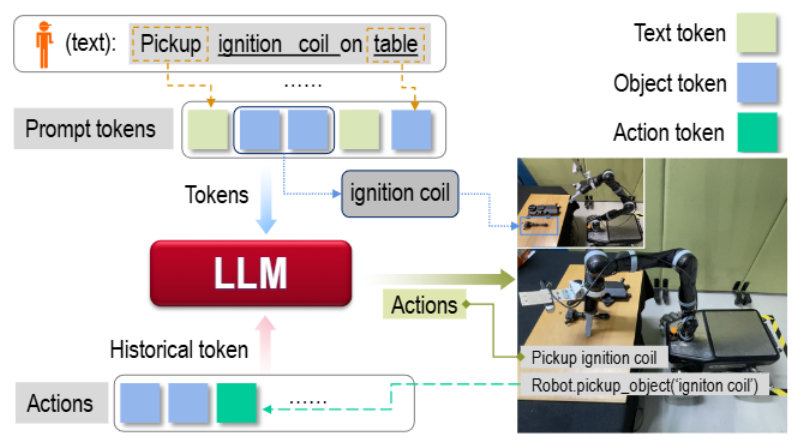
Humans often use natural language instructions to control and interact with robots for task execution. This presents a significant challenge for robots, as they have to not only comprehend and link human commands with robot actions but also have a semantic understanding of operating scenes/environments. To address this challenge, we present a vision-language-conditioned learning policy for robotic manipulation. Given a scene image, we utilise a vision-language model (GPT-4o) to realise a semantic understanding of the scene and its constituent object detection and grounding. Our approach takes a limited set of images to reveal the spatial-temporal relationship of the objects. Then, we develop a GPT-o1-driven approach to performing logic reasoning behind language tasks and high-level control code generation. With the establishment of 6D pose estimates, a language-perception-action method is proposed to link language instructions with robot behaviours for robotic manipulation. The performance of the developed approach is experimentally validated through industrial object manipulation.
Vision-Language-Conditioned Learning Policy for Robotic Manipulation
Sichao Liu, Zhihao Liu, Lihui Wang, Xi Vincent Wang
Conference on Robot Learning, Workshop on Language and Robot Learning: Language as an Interface 2024
Humans often use natural language instructions to control and interact with robots for task execution. This presents a significant challenge for robots, as they have to not only comprehend and link human commands with robot actions but also have a semantic understanding of operating scenes/environments. To address this challenge, we present a vision-language-conditioned learning policy for robotic manipulation. Given a scene image, we utilise a vision-language model (GPT-4o) to realise a semantic understanding of the scene and its constituent object detection and grounding. Our approach takes a limited set of images to reveal the spatial-temporal relationship of the objects. Then, we develop a GPT-o1-driven approach to performing logic reasoning behind language tasks and high-level control code generation. With the establishment of 6D pose estimates, a language-perception-action method is proposed to link language instructions with robot behaviours for robotic manipulation. The performance of the developed approach is experimentally validated through industrial object manipulation.
Data-efficient multimodal human action recognition for proactive human–robot collaborative assembly: A cross-domain few-shot learning approach
Tianyu Wang, Zhihao Liu, Lihui Wang, Mian Li, Xi Vincent Wang
Robotics and Computer-Integrated Manufacturing 2024
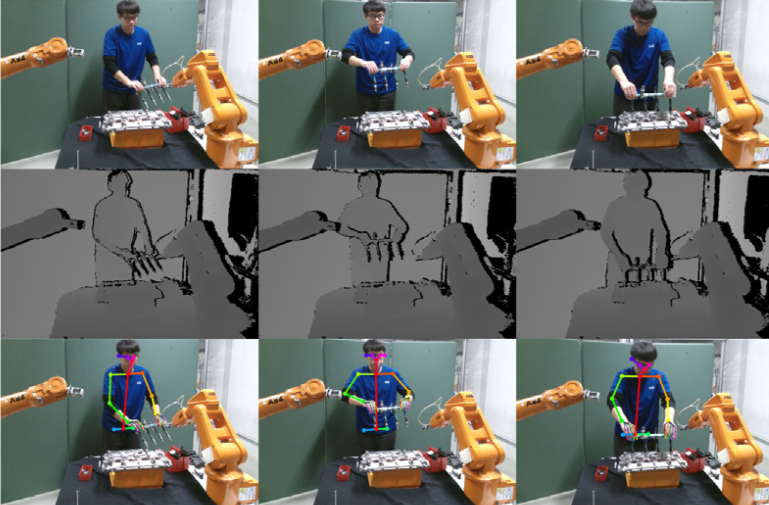
With the recent vision of Industry 5.0, the cognitive capability of robots plays a crucial role in advancing proactive human-robot collaborative assembly. As a basis of the mutual empathy, the understanding of a human operator's intention has been primarily studied through the technique of human action recognition. Existing deep learning-based methods demonstrate remarkable efficacy in handling information-rich data such as physiological measurements and videos, where the latter category represents a more natural perception input. However, deploying these methods in new unseen assembly scenarios requires first collecting abundant case-specific data. This leads to significant manual effort and poor flexibility. To deal with the issue, this paper proposes a novel cross-domain few-shot learning method for data-efficient multimodal human action recognition. A hierarchical data fusion mechanism is designed to jointly leverage the skeletons, RGB images and depth maps with complementary information. Then a temporal CrossTransformer is developed to enable the action recognition with very limited amount of data. Lightweight domain adapters are integrated to further improve the generalization with fast finetuning. Extensive experiments on a real car engine assembly case show the superior performance of proposed method over state-of-the-art regarding both accuracy and finetuning efficiency. Real-time demonstrations and ablation study further indicate the potential of early recognition, which is beneficial for the robot procedures generation in practical applications. In summary, this paper contributes to the rarely explored realm of data-efficient human action recognition for proactive human-robot collaboration.
Data-efficient multimodal human action recognition for proactive human–robot collaborative assembly: A cross-domain few-shot learning approach
Tianyu Wang, Zhihao Liu, Lihui Wang, Mian Li, Xi Vincent Wang
Robotics and Computer-Integrated Manufacturing 2024
With the recent vision of Industry 5.0, the cognitive capability of robots plays a crucial role in advancing proactive human-robot collaborative assembly. As a basis of the mutual empathy, the understanding of a human operator's intention has been primarily studied through the technique of human action recognition. Existing deep learning-based methods demonstrate remarkable efficacy in handling information-rich data such as physiological measurements and videos, where the latter category represents a more natural perception input. However, deploying these methods in new unseen assembly scenarios requires first collecting abundant case-specific data. This leads to significant manual effort and poor flexibility. To deal with the issue, this paper proposes a novel cross-domain few-shot learning method for data-efficient multimodal human action recognition. A hierarchical data fusion mechanism is designed to jointly leverage the skeletons, RGB images and depth maps with complementary information. Then a temporal CrossTransformer is developed to enable the action recognition with very limited amount of data. Lightweight domain adapters are integrated to further improve the generalization with fast finetuning. Extensive experiments on a real car engine assembly case show the superior performance of proposed method over state-of-the-art regarding both accuracy and finetuning efficiency. Real-time demonstrations and ablation study further indicate the potential of early recognition, which is beneficial for the robot procedures generation in practical applications. In summary, this paper contributes to the rarely explored realm of data-efficient human action recognition for proactive human-robot collaboration.

Adaptive real-time similar repetitive manual procedure prediction and robotic procedure generation for human-robot collaboration
Zhihao Liu, Quan Liu, Wenjun Xu, Lihui Wang, Zhenrui Ji
Advanced Engineering Informatics 2023
Manual procedure recognition and prediction are essential for practical human-robot collaboration in industrial tasks, such as collaborative assembly. However, current research mostly focuses on diverse human motions, while the similar repetitive manual procedures that are prevalent in real production tasks are often overlooked. Furthermore, the dynamic uncertainty caused by human-robot interferences and the generalisation of individuals, scenarios, and multiple sensor deployments pose challenges for implementing manual procedure prediction and robotic procedure generation. To address these issues, this paper proposes a real-time, similar repetitive procedure-oriented human skeleton processing system that employs the human skeleton as a robust modality. It utilises an improved deep spatial-temporal graph convolutional network and a FIFO queue-based discriminator for real-time data processing, procedure prediction, and generation. The proposed method is validated on multiple datasets with tens of individuals engaged in a real dynamic and uncertain human-robot collaborative assembly cell and able to run on entry-level hardware. The results demonstrate competitive performance of handcraft feature-free, early prediction and generalisation on individual variance, environment background, camera position, lighting conditions, and stochastic interference in human-robot collaboration.
Adaptive real-time similar repetitive manual procedure prediction and robotic procedure generation for human-robot collaboration
Zhihao Liu, Quan Liu, Wenjun Xu, Lihui Wang, Zhenrui Ji
Advanced Engineering Informatics 2023
Manual procedure recognition and prediction are essential for practical human-robot collaboration in industrial tasks, such as collaborative assembly. However, current research mostly focuses on diverse human motions, while the similar repetitive manual procedures that are prevalent in real production tasks are often overlooked. Furthermore, the dynamic uncertainty caused by human-robot interferences and the generalisation of individuals, scenarios, and multiple sensor deployments pose challenges for implementing manual procedure prediction and robotic procedure generation. To address these issues, this paper proposes a real-time, similar repetitive procedure-oriented human skeleton processing system that employs the human skeleton as a robust modality. It utilises an improved deep spatial-temporal graph convolutional network and a FIFO queue-based discriminator for real-time data processing, procedure prediction, and generation. The proposed method is validated on multiple datasets with tens of individuals engaged in a real dynamic and uncertain human-robot collaborative assembly cell and able to run on entry-level hardware. The results demonstrate competitive performance of handcraft feature-free, early prediction and generalisation on individual variance, environment background, camera position, lighting conditions, and stochastic interference in human-robot collaboration.
Robot learning towards smart robotic manufacturing: A review
Zhihao Liu, Quan Liu, Wenjun Xu, Lihui Wang, Zude Zhou
Robotics and Computer-Integrated Manufacturing 2022
Robotic equipment has been playing a central role since the proposal of smart manufacturing. Since the beginning of the first integration of industrial robots into production lines, industrial robots have enhanced productivity and relieved humans from heavy workloads significantly. Towards the next generation of manufacturing, this review first introduces the comprehensive background of smart robotic manufacturing within robotics, machine learning, and robot learning. Definitions and categories of robot learning are summarised. Concretely, imitation learning, policy gradient learning, value function learning, actor-critic learning, and model-based learning as the leading technologies in robot learning are reviewed. Training tools, benchmarks, and comparisons amongst different robot learning methods are delivered. Typical industrial applications in robotic grasping, assembly, process control, and industrial human-robot collaboration are listed and discussed. Finally, open problems and future research directions are summarised.
Robot learning towards smart robotic manufacturing: A review
Zhihao Liu, Quan Liu, Wenjun Xu, Lihui Wang, Zude Zhou
Robotics and Computer-Integrated Manufacturing 2022
Robotic equipment has been playing a central role since the proposal of smart manufacturing. Since the beginning of the first integration of industrial robots into production lines, industrial robots have enhanced productivity and relieved humans from heavy workloads significantly. Towards the next generation of manufacturing, this review first introduces the comprehensive background of smart robotic manufacturing within robotics, machine learning, and robot learning. Definitions and categories of robot learning are summarised. Concretely, imitation learning, policy gradient learning, value function learning, actor-critic learning, and model-based learning as the leading technologies in robot learning are reviewed. Training tools, benchmarks, and comparisons amongst different robot learning methods are delivered. Typical industrial applications in robotic grasping, assembly, process control, and industrial human-robot collaboration are listed and discussed. Finally, open problems and future research directions are summarised.
Deep reinforcement learning-based safe interaction for industrial human-robot collaboration using intrinsic reward functions
Quan Liu, Zhihao Liu, Bo Xiong, Wenjun Xu, Yang Liu
Advanced Engineering Informatics 2021
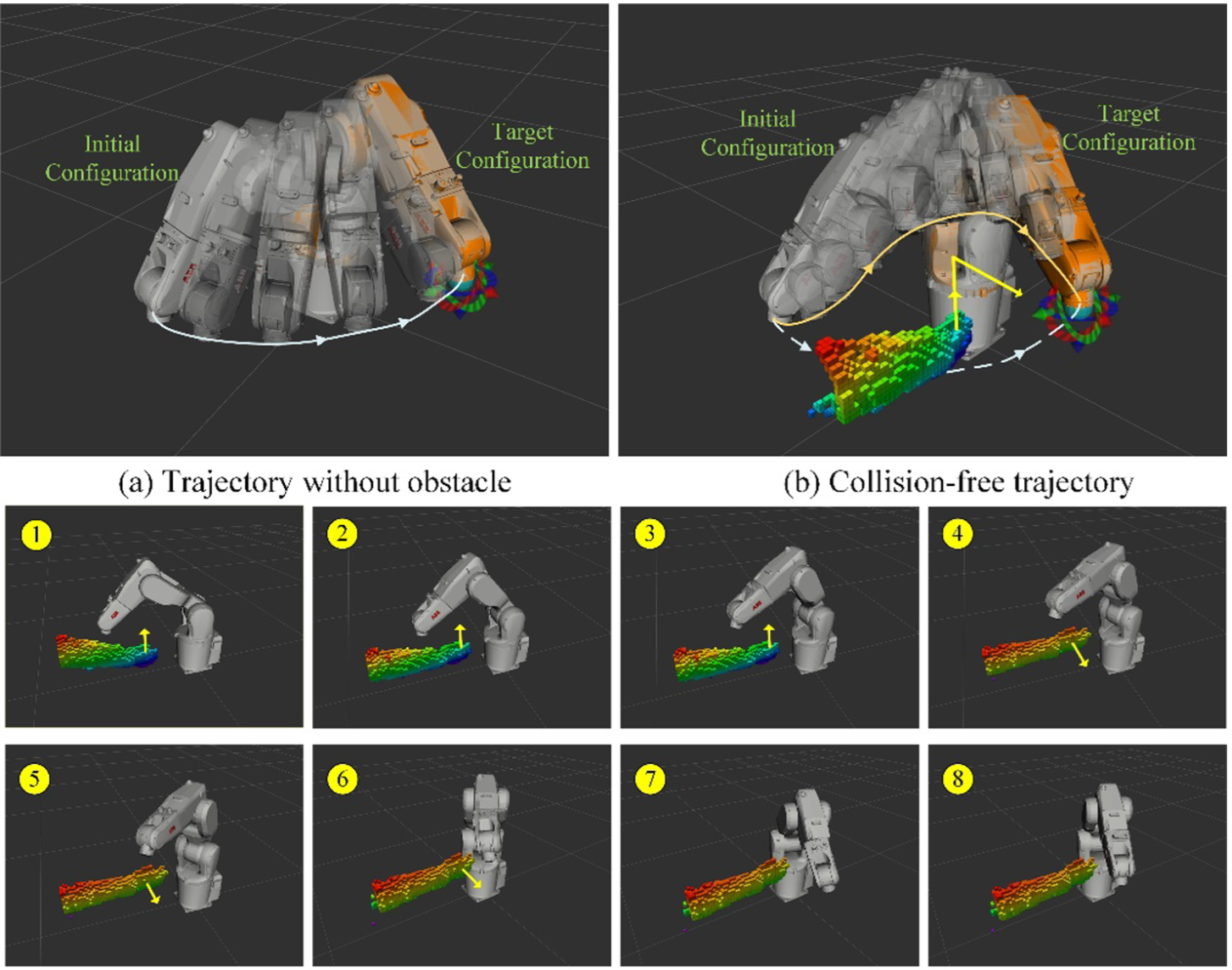
Aiming at human-robot collaboration in manufacturing, the operator's safety is the primary issue during the manufacturing operations. This paper presents a deep reinforcement learning approach to realize the real-time collision-free motion planning of an industrial robot for human-robot collaboration. Firstly, the safe human-robot collaboration manufacturing problem is formulated into a Markov decision process, and the mathematical expression of the reward function design problem is given. The goal is that the robot can autonomously learn a policy to reduce the accumulated risk and assure the task completion time during human-robot collaboration. To transform our optimization object into a reward function to guide the robot to learn the expected behaviour, a reward function optimizing approach based on the deterministic policy gradient is proposed to learn a parameterized intrinsic reward function. The reward function for the agent to learn the policy is the sum of the intrinsic reward function and the extrinsic reward function. Then, a deep reinforcement learning algorithm intrinsic reward-deep deterministic policy gradient (IRDDPG), which is the combination of the DDPG algorithm and the reward function optimizing approach, is proposed to learn the expected collision avoidance policy. Finally, the proposed algorithm is tested in a simulation environment, and the results show that the industrial robot can learn the expected policy to achieve the safety assurance for industrial human-robot collaboration without missing the original target. Moreover, the reward function optimizing approach can help make up for the designed reward function and improve policy performance.
Deep reinforcement learning-based safe interaction for industrial human-robot collaboration using intrinsic reward functions
Quan Liu, Zhihao Liu, Bo Xiong, Wenjun Xu, Yang Liu
Advanced Engineering Informatics 2021
Aiming at human-robot collaboration in manufacturing, the operator's safety is the primary issue during the manufacturing operations. This paper presents a deep reinforcement learning approach to realize the real-time collision-free motion planning of an industrial robot for human-robot collaboration. Firstly, the safe human-robot collaboration manufacturing problem is formulated into a Markov decision process, and the mathematical expression of the reward function design problem is given. The goal is that the robot can autonomously learn a policy to reduce the accumulated risk and assure the task completion time during human-robot collaboration. To transform our optimization object into a reward function to guide the robot to learn the expected behaviour, a reward function optimizing approach based on the deterministic policy gradient is proposed to learn a parameterized intrinsic reward function. The reward function for the agent to learn the policy is the sum of the intrinsic reward function and the extrinsic reward function. Then, a deep reinforcement learning algorithm intrinsic reward-deep deterministic policy gradient (IRDDPG), which is the combination of the DDPG algorithm and the reward function optimizing approach, is proposed to learn the expected collision avoidance policy. Finally, the proposed algorithm is tested in a simulation environment, and the results show that the industrial robot can learn the expected policy to achieve the safety assurance for industrial human-robot collaboration without missing the original target. Moreover, the reward function optimizing approach can help make up for the designed reward function and improve policy performance.
Task-level decision-making for dynamic and stochastic human-robot collaboration based on dual agents deep reinforcement learning
Zhihao Liu, Quan Liu, Lihui Wang, Wenjun Xu, Zude Zhou
International Journal of Advanced Manufacturing Technology 2021
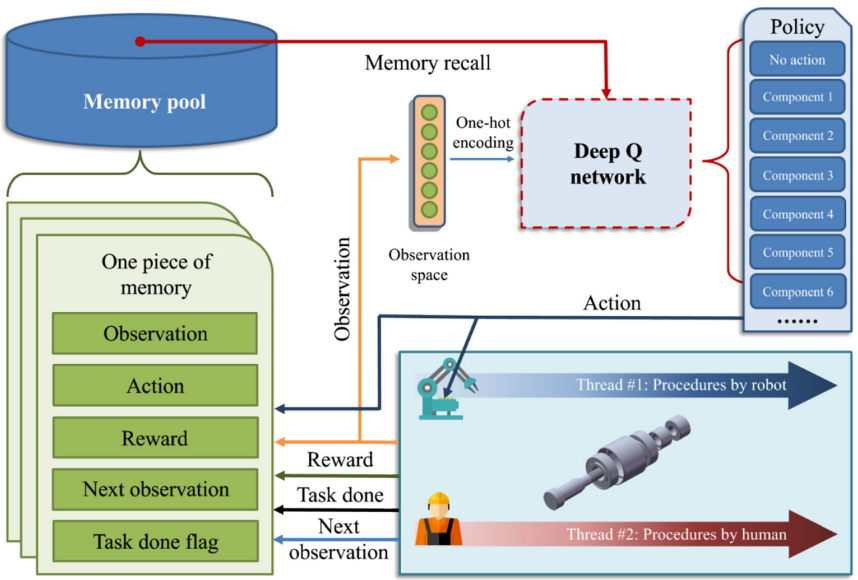
Human-robot collaboration as a multidisciplinary research topic is still pursuing the robots’ enhanced intelligence to be more human-compatible and fit the dynamic and stochastic characteristics of human. However, the uncertainties brought by the human partner challenge the task-planning and decision-making of the robot. When aiming at industrial tasks like collaborative assembly, dynamics on temporal dimension and stochasticities on the order of procedures need to be further considered. In this work, we bring a new perspective and solution based on reinforcement learning, where the problem is regarded as training an agent towards tasks in dynamic and stochastic environments. Concretely, an adapted training approach based on the deep Q learning method is proposed. This method regards both the robot and the human as the agents in the interactive training environment for deep reinforcement learning. With the consideration of task-level industrial human-robot collaboration, the training logic and the agent-environment interaction have been proposed. For the human-robot collaborative assembly tasks in the case study, it is illustrated that our method could drive the robot represented by one agent to collaborate with the human partner even the human performs randomly on the task procedures.
Task-level decision-making for dynamic and stochastic human-robot collaboration based on dual agents deep reinforcement learning
Zhihao Liu, Quan Liu, Lihui Wang, Wenjun Xu, Zude Zhou
International Journal of Advanced Manufacturing Technology 2021
Human-robot collaboration as a multidisciplinary research topic is still pursuing the robots’ enhanced intelligence to be more human-compatible and fit the dynamic and stochastic characteristics of human. However, the uncertainties brought by the human partner challenge the task-planning and decision-making of the robot. When aiming at industrial tasks like collaborative assembly, dynamics on temporal dimension and stochasticities on the order of procedures need to be further considered. In this work, we bring a new perspective and solution based on reinforcement learning, where the problem is regarded as training an agent towards tasks in dynamic and stochastic environments. Concretely, an adapted training approach based on the deep Q learning method is proposed. This method regards both the robot and the human as the agents in the interactive training environment for deep reinforcement learning. With the consideration of task-level industrial human-robot collaboration, the training logic and the agent-environment interaction have been proposed. For the human-robot collaborative assembly tasks in the case study, it is illustrated that our method could drive the robot represented by one agent to collaborate with the human partner even the human performs randomly on the task procedures.
Digital twin-enabled reconfigurable modeling for smart manufacturing systems
Chenyuan Zhang, Wenjun Xu, Jiayi Liu, Zhihao Liu, Zude Zhou, Duc Truong Pham
International Journal of Computer Integrated Manufacturing 2021
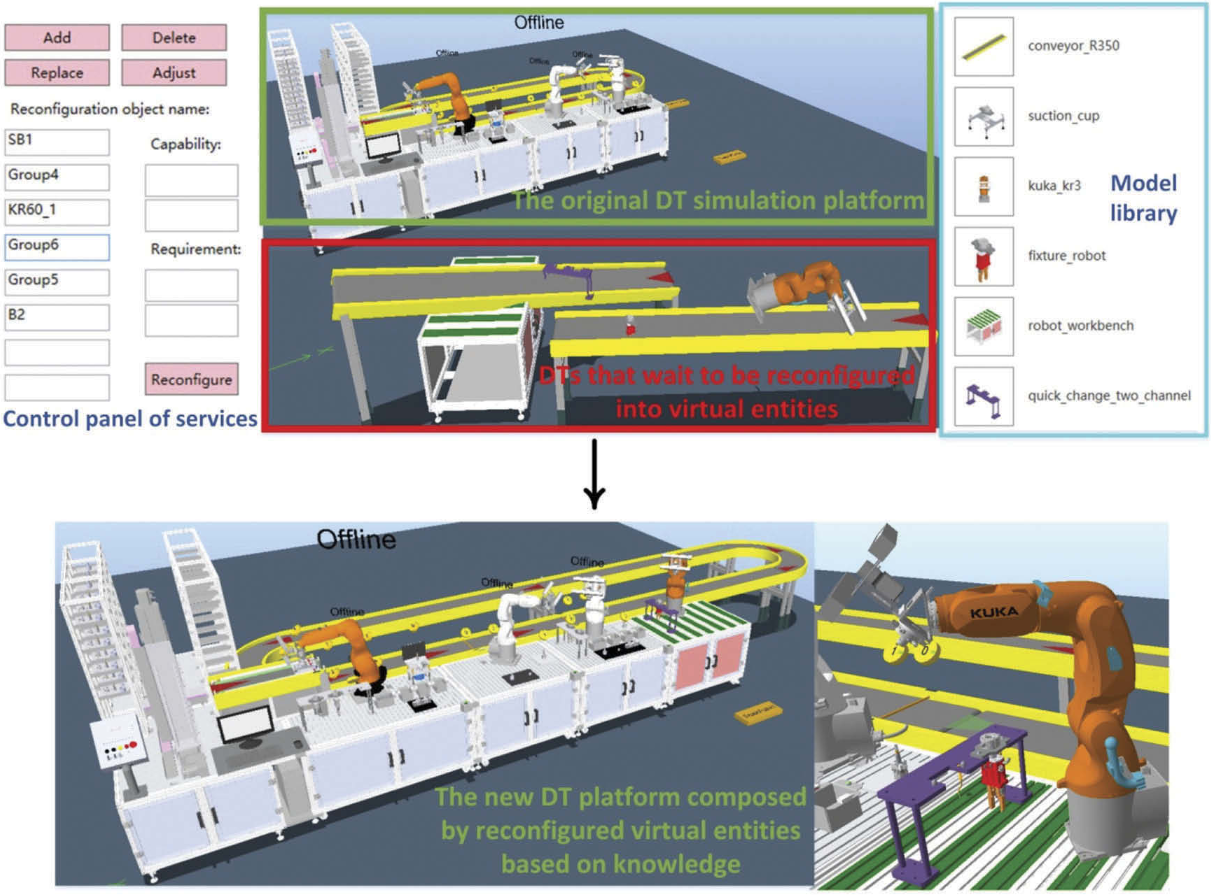
The digital twin-based manufacturing system is a typical representative of smart manufacturing and has a number of advantages beyond the state of the art. However, when a manufacturing system needs to be reconfigured to meet new requirements of production, manual reconfiguration is time-consuming and high labor cost because of the complexity of the digital twin-based manufacturing system and the imperfection of related models. This problem will be even worse if there are industrial robots with characteristics of complex functions and inflexible programming in the manufacturing system. This paper presents a five-dimensional fusion model of a digital twin virtual entity for robotics-based smart manufacturing systems to support automatic reconfiguration, which can not only realistically describes physical manufacturing resources, but also represents the capabilities and dependencies of the digital twins. Reconfigurable strategies based on service function blocks, which can improve the reusability of functions and algorithms, are proposed to make the robotics-based manufacturing system satisfy the various reconfigurable requirements of different granularities and goals. Finally, a prototype system is developed to demonstrate the performance of the reconfigurable digital twin-based manufacturing system, which can improve the operation efficiency of such systems for carrying out the reconfiguring production tasks in a flexible way.
Digital twin-enabled reconfigurable modeling for smart manufacturing systems
Chenyuan Zhang, Wenjun Xu, Jiayi Liu, Zhihao Liu, Zude Zhou, Duc Truong Pham
International Journal of Computer Integrated Manufacturing 2021
The digital twin-based manufacturing system is a typical representative of smart manufacturing and has a number of advantages beyond the state of the art. However, when a manufacturing system needs to be reconfigured to meet new requirements of production, manual reconfiguration is time-consuming and high labor cost because of the complexity of the digital twin-based manufacturing system and the imperfection of related models. This problem will be even worse if there are industrial robots with characteristics of complex functions and inflexible programming in the manufacturing system. This paper presents a five-dimensional fusion model of a digital twin virtual entity for robotics-based smart manufacturing systems to support automatic reconfiguration, which can not only realistically describes physical manufacturing resources, but also represents the capabilities and dependencies of the digital twins. Reconfigurable strategies based on service function blocks, which can improve the reusability of functions and algorithms, are proposed to make the robotics-based manufacturing system satisfy the various reconfigurable requirements of different granularities and goals. Finally, a prototype system is developed to demonstrate the performance of the reconfigurable digital twin-based manufacturing system, which can improve the operation efficiency of such systems for carrying out the reconfiguring production tasks in a flexible way.
Dynamic risk assessment and active response strategy for industrial human-robot collaboration
Zhihao Liu, Xinran Wang, Yijie Cai, Wenjun Xu, Quan Liu, Zude Zhou, Duc Truong Pham
Computers & Industrial Engineering 2020
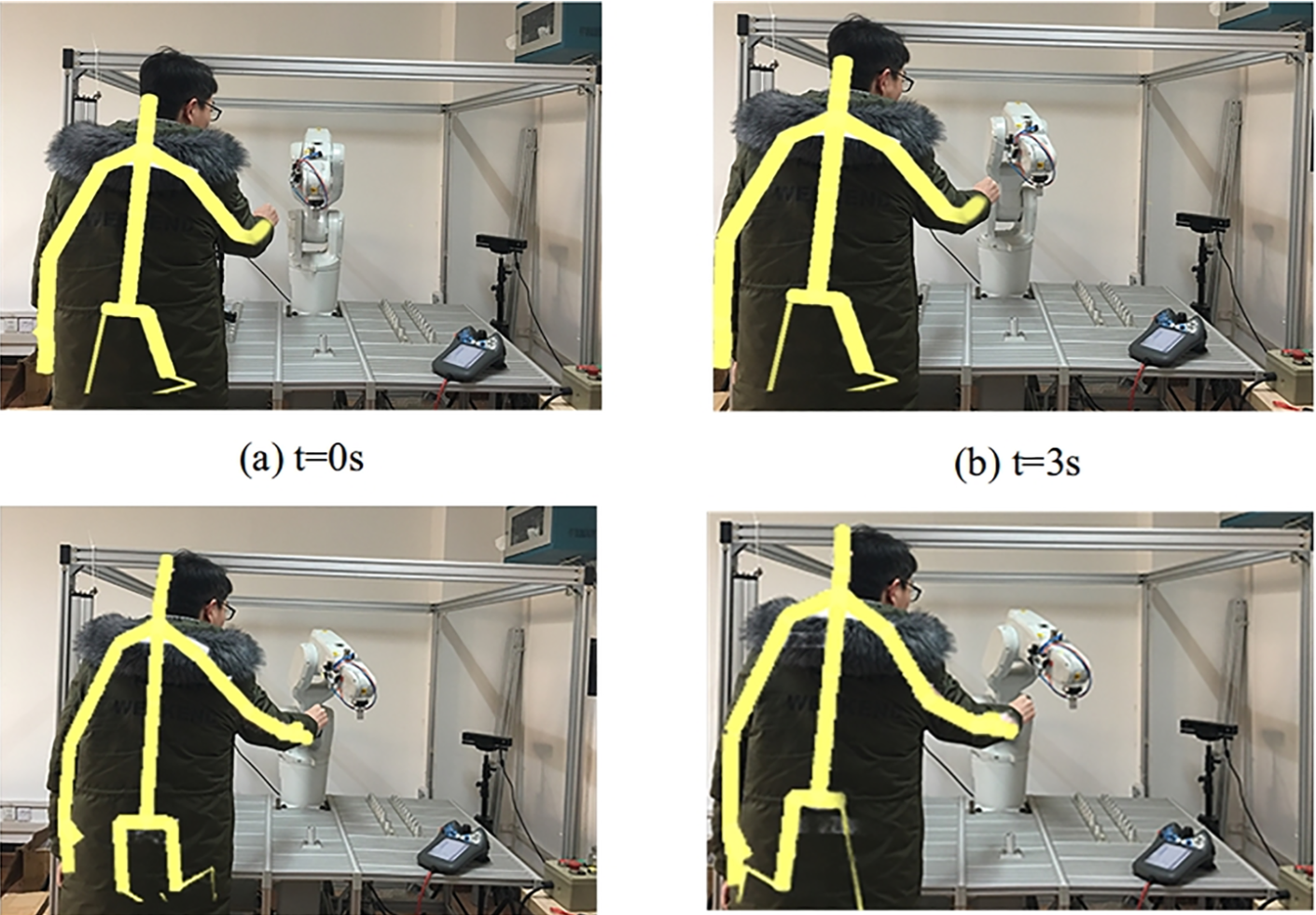
To enhance flexibility and sustainability, human-robot collaboration is becoming a major feature of next-generation robots. The safety assessment strategy is the first and crucial issue that needs to be considered due to the removal of the safety barrier. This paper determined the set of safety indicators and established an assessment model based on the latest safety-related ISO standards and manufacturing conditions. A dynamic modified SSM (speed and separation monitoring) method is presented for ensuring the safety of human-robot collaboration while maintaining productivity as high as possible. A prototype system including dynamic risk assessment and safe motion control is developed based on the virtual model of the robot and human skeleton point data from the vision sensor. The real-time risk status of the working robot can be known and the risk field around the robot which is visualized in an augmented reality environment so as to ensure safe human-robot collaboration. This system is experimentally validated on a human-robot collaboration cell using an industrial robot with six degrees of freedom.
Dynamic risk assessment and active response strategy for industrial human-robot collaboration
Zhihao Liu, Xinran Wang, Yijie Cai, Wenjun Xu, Quan Liu, Zude Zhou, Duc Truong Pham
Computers & Industrial Engineering 2020
To enhance flexibility and sustainability, human-robot collaboration is becoming a major feature of next-generation robots. The safety assessment strategy is the first and crucial issue that needs to be considered due to the removal of the safety barrier. This paper determined the set of safety indicators and established an assessment model based on the latest safety-related ISO standards and manufacturing conditions. A dynamic modified SSM (speed and separation monitoring) method is presented for ensuring the safety of human-robot collaboration while maintaining productivity as high as possible. A prototype system including dynamic risk assessment and safe motion control is developed based on the virtual model of the robot and human skeleton point data from the vision sensor. The real-time risk status of the working robot can be known and the risk field around the robot which is visualized in an augmented reality environment so as to ensure safe human-robot collaboration. This system is experimentally validated on a human-robot collaboration cell using an industrial robot with six degrees of freedom.
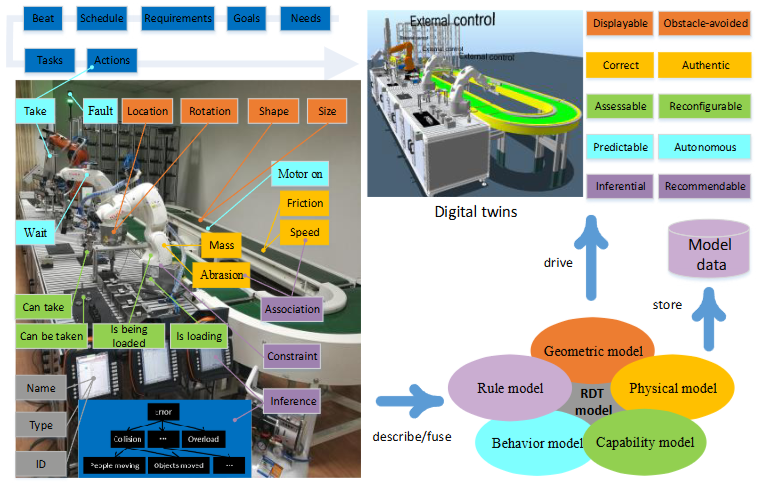
A Reconfigurable Modeling Approach for Digital Twin-based Manufacturing System
Chenyuan Zhang, Wenjun Xu, Jiayi Liu, Zhihao Liu, Zude Zhou, Duc Truong Pham
11th CIRP Conference on Industrial Product-Service Systems 2019 Best Application Paper Oral
The emergence of digital twin enables real-time interaction and integration between the physical world and the information world. Digital twin-based manufacturing systems, as a typical representative of smart manufacturing, have a set of advantages beyond the traditional ones, such as verifying and predicting the manufacturing system performance based on the operation of a virtual one. This paper presents a five-dimensional digital twin modeling approach for manufacturing systems, which can not only realize the mapping between the physical and virtual twins, but also some of the capabilities and dependencies of the digital twins can be derived. A reconfigurable strategy, based on the expandable model structure and the reserved interfaces of objective functions and optimization algorithms, is proposed to make the digital twin-based manufacturing system satisfy the various reconfigurable requirements of different granularities and targets. Finally, a prototype system is developed to demonstrate the performance of the reconfigurable digital twin-based manufacturing system, which can improve the operation efficiency of such systems for carrying out the reconfiguring production tasks.
A Reconfigurable Modeling Approach for Digital Twin-based Manufacturing System
Chenyuan Zhang, Wenjun Xu, Jiayi Liu, Zhihao Liu, Zude Zhou, Duc Truong Pham
11th CIRP Conference on Industrial Product-Service Systems 2019 Best Application Paper Oral
The emergence of digital twin enables real-time interaction and integration between the physical world and the information world. Digital twin-based manufacturing systems, as a typical representative of smart manufacturing, have a set of advantages beyond the traditional ones, such as verifying and predicting the manufacturing system performance based on the operation of a virtual one. This paper presents a five-dimensional digital twin modeling approach for manufacturing systems, which can not only realize the mapping between the physical and virtual twins, but also some of the capabilities and dependencies of the digital twins can be derived. A reconfigurable strategy, based on the expandable model structure and the reserved interfaces of objective functions and optimization algorithms, is proposed to make the digital twin-based manufacturing system satisfy the various reconfigurable requirements of different granularities and targets. Finally, a prototype system is developed to demonstrate the performance of the reconfigurable digital twin-based manufacturing system, which can improve the operation efficiency of such systems for carrying out the reconfiguring production tasks.
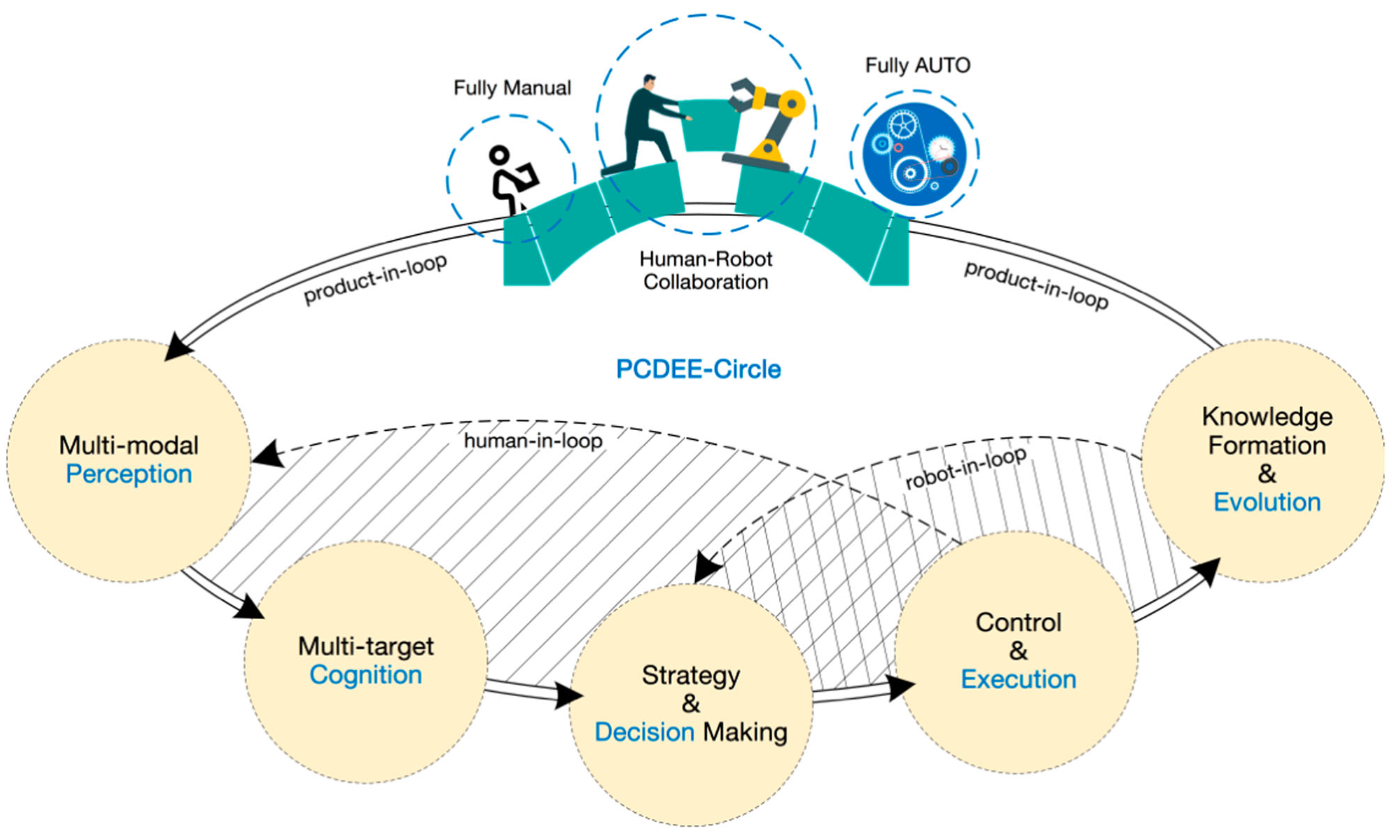
Human-robot collaboration in disassembly for sustainable manufacturing
Quan Liu, Zhihao Liu, Wenjun Xu, Quan Tang, Zude Zhou, Duc Truong Pham
International Journal of Production Research 2019
Sustainable manufacturing is a global front-burner issue oriented to the sustainable development of humanity and society. In this context, this paper takes the human-robot collaborative disassembly (HRCD) as the topic on its contribution to economic, environmental and social sustainability. In addition, a detailed enabling systematic implementation for HRCD is presented, combined with a set of advanced technologies such as cyber-physical production system (CPPS) and artificial intelligence (AI), and it involves five aspects which including perception, cognition, decision, execution and evolution aiming at the dynamics, uncertainties and complexities in disassembly. Deep reinforcement learning, incremental learning and transfer learning are also investigated in the systematic approaches for HRCD. The demonstration in the case study contains experiment results of multi-modal perception for robot system and human body in hybrid human-robot collaborative disassembly cell, sequence planning for an HRCD task, distance based safety strategy and motion driven control method, and it manifests high feasibility and effectiveness of the proposed approaches for HRCD and verifies the functionalities of the systematic framework.
Human-robot collaboration in disassembly for sustainable manufacturing
Quan Liu, Zhihao Liu, Wenjun Xu, Quan Tang, Zude Zhou, Duc Truong Pham
International Journal of Production Research 2019
Sustainable manufacturing is a global front-burner issue oriented to the sustainable development of humanity and society. In this context, this paper takes the human-robot collaborative disassembly (HRCD) as the topic on its contribution to economic, environmental and social sustainability. In addition, a detailed enabling systematic implementation for HRCD is presented, combined with a set of advanced technologies such as cyber-physical production system (CPPS) and artificial intelligence (AI), and it involves five aspects which including perception, cognition, decision, execution and evolution aiming at the dynamics, uncertainties and complexities in disassembly. Deep reinforcement learning, incremental learning and transfer learning are also investigated in the systematic approaches for HRCD. The demonstration in the case study contains experiment results of multi-modal perception for robot system and human body in hybrid human-robot collaborative disassembly cell, sequence planning for an HRCD task, distance based safety strategy and motion driven control method, and it manifests high feasibility and effectiveness of the proposed approaches for HRCD and verifies the functionalities of the systematic framework.
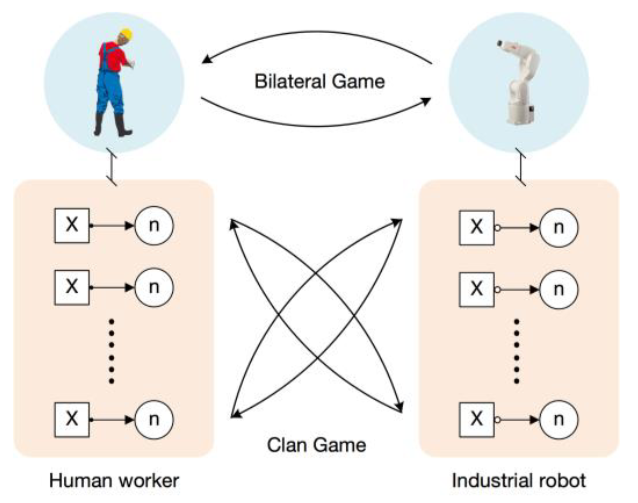
Human-Robot Collaborative Manufacturing Using Cooperative Game: Framework and Implementation
Zhihao Liu, Quan Liu, Wenjun Xu, Zude Zhou, Duc Truong Pham
51st CIRP Conference on Manufacturing Systems 2018 Honorary Paper Oral
Human-robot collaborative manufacturing (HRC-Mfg) is an innovative production mode, however currently the theoretical explanation for the collaboration mechanisms is limited. Considering the dynamics and uncertainties in manufacturing environment, it is also crucial for both task allocation and decision-making. In the sight of cyber-physical production system, based on bilateral game and clan game, this paper presents the characteristics of HRC-Mfg and demonstrates the applicability of cooperative game in such system. Moreover, we also develop a framework and approach to describe how the mechanism works in detail. The case study shows it can dynamically arrange procedures and maximize the production benefit.
Human-Robot Collaborative Manufacturing Using Cooperative Game: Framework and Implementation
Zhihao Liu, Quan Liu, Wenjun Xu, Zude Zhou, Duc Truong Pham
51st CIRP Conference on Manufacturing Systems 2018 Honorary Paper Oral
Human-robot collaborative manufacturing (HRC-Mfg) is an innovative production mode, however currently the theoretical explanation for the collaboration mechanisms is limited. Considering the dynamics and uncertainties in manufacturing environment, it is also crucial for both task allocation and decision-making. In the sight of cyber-physical production system, based on bilateral game and clan game, this paper presents the characteristics of HRC-Mfg and demonstrates the applicability of cooperative game in such system. Moreover, we also develop a framework and approach to describe how the mechanism works in detail. The case study shows it can dynamically arrange procedures and maximize the production benefit.